Kiedy większość z nas podnosi przedmiot, nie musimy myśleć o tym, jak go ustawić w dłoni. To coś, co przychodzi nam naturalnie, gdy uczymy się nawigować po świecie. To coś, co pozwala małym dzieciom być bardziej zręcznym w rękach niż nawet najbardziej zaawansowane roboty dostępne obecnie.
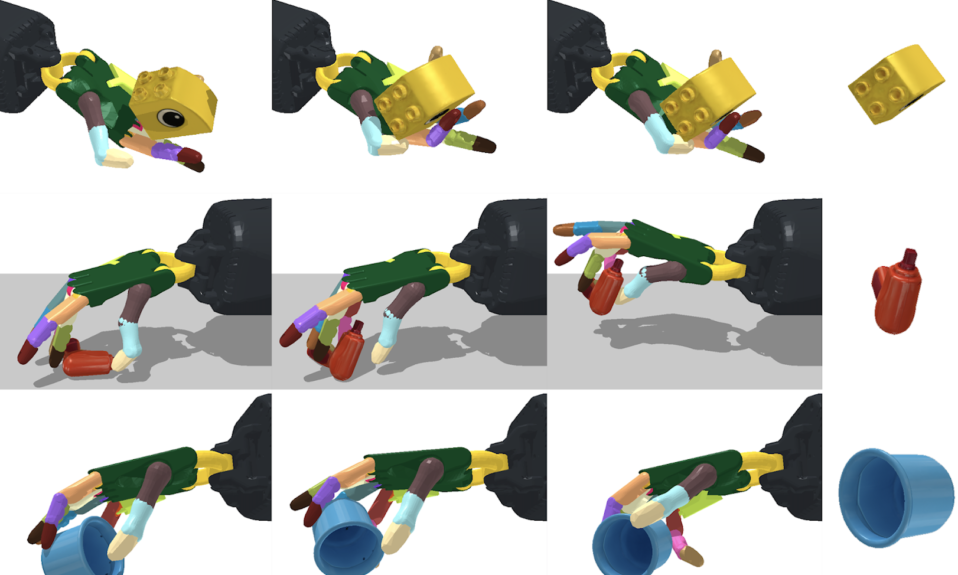
Ale to może się szybko zmienić. Zespół naukowców z laboratorium informatyki i sztucznej inteligencji MIT opracował system, który pewnego dnia może dać robotom taką samą zręczność. Korzystając z algorytmu AI wzmacniającego bez modelu, stworzyli symulowaną, antropomorficzną rękę, która mogła manipulować ponad 2000 obiektami. Co więcej, system nie musiał wiedzieć, co ma odebrać, aby znaleźć sposób na poruszanie nim w dłoni.
System nie jest jeszcze gotowy do użytku w świecie rzeczywistym. Aby rozpocząć, zespół musi przenieść go do prawdziwego robota. To może nie być taka blokada, jak myślisz. Na początku roku widzieliśmy naukowców z Uniwersytetu Zhejiang i Uniwersytetu w Edynburgu z powodzeniem przenoszących podejście do wzmacniania si do ich Robot Dog Jueing. System pozwolił robotowi nauczyć się samodzielnie chodzić i odzyskiwać siły po upadkach.
W obecnej sytuacji system również nie jest doskonały. Może zmienić orientację wielu mniejszych obiektów, w tym takich jak piłki tenisowe i jabłka, z prawie 100% skutecznością, ale narzędzia takie jak śrubokręty i nożyczki stanowią wyzwanie. Jeśli chodzi o tego typu obiekty, ich wskaźnik sukcesu spada bliżej 30 procent. Potencjał systemu jest jednak ogromny. Może pewnego dnia sprawić, że roboty będą lepiej manipulować narzędziami i znacznie bardziej wydajne w zadaniach takich jak pakowanie pudełek.
Wszystkie produkty polecane przez Engadget są wybierane przez nasz zespół redakcyjny, niezależnie od naszej firmy macierzystej. Niektóre z naszych historii zawierają linki partnerskie. Jeśli kupisz coś za pośrednictwem jednego z tych linków, możemy zarobić prowizję partnerską.